


- CityInMotion – Urbanes virtuelles Testfeld für hochautomatisierte Fahrzeuge 15. Dezember 2021
Die Entwicklungen im Projekt CityInMotion haben wieder Fahrt aufgenommen. Zusammen mit dem 4C Labor der TH Köln und AVL SCHRICK GmbH wurde ein zeitintensiver Vehicle-in-the-Loop Test (ViL) innerhalb unserer virtuellen Kölner Szene durchgeführt.
Mit großem Erfolg – der erste Proof of Concept ist vorbei. Wir freuen uns auf unsere Entwicklungen im nächsten Jahr.
- Proof of Concept am ViL-Prüfstand 14. Juli 2021
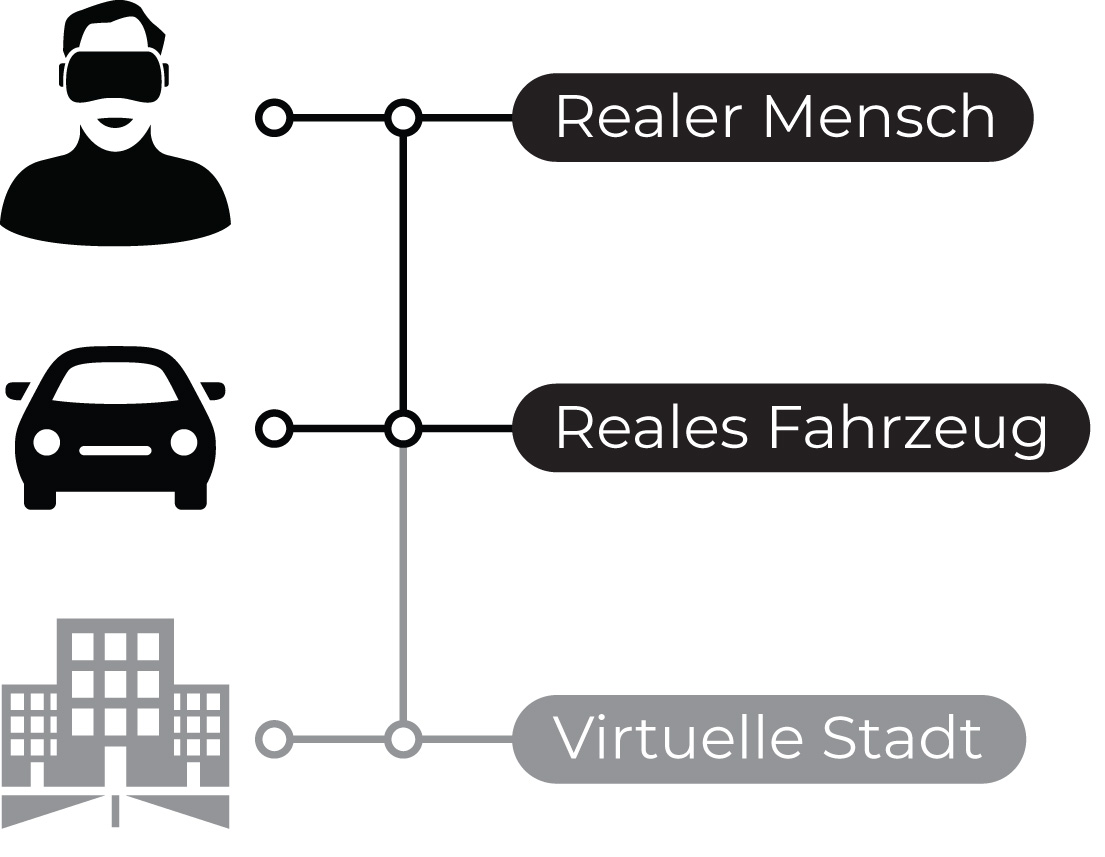
Zur Hälfte des Projektes konnte das Projektteam im Proof of Concept die Funktionsweise des virtuellen urbanen Testfelds an einem Vehicle in the Loop Prüfstand nachweisen. Hier konnte die Echtzeit-Verknüpfung zwischen dem Fahrzeugprüfstand mit verknüpftem Fahrzeugmodell, der virtuellen Umgebung und der Live-Integration von Personen ins virtuelle Testfeld getestet und in ersten Iterationen validiert werden.
Ein besonderer Dank gilt hier der AVL Deutschland und dem Fachgebiet Kraftfahrzeuge der TU Berlin.

- SiL und HiL-Test 11. Juni 2021
In den vorangeschrittenen Arbeitspakten konnten die individuellen Lösungen erarbeitet werden. In den ersten Software in the Loop und Hardware in the Loop Testaufbauten konnten die Modellversuche im virtuellen urbanen Testfeld umgesetzt werden.
- Aufbau des Modellprüfstandes 15. April 2021
In den ersten Monaten des Jahres konnte an der TH Köln ein modellhafter Prüfstand aufgebaut und in Betrieb genommen werden. Hier können erste Tests der Schnittstellenkommunikation getestet werden.
- Projekttreffen zum Aufbau der Schnittstellen und Echtzeit-Kommunikation 17. November 2020
In einem intensiven Workshop ist ein gemeinsames Verständnis für die bisherigen Projektergebnisse zu schaffen. Anschließend konnten machbare Kommunikationsstrategien erarbeitet werden, welche es in den kommenden Monaten zu untersuchen, entwickeln und validieren gilt.
- Technische Entwicklungen der Partner schreiten voran 23. Juli 2020
In den ersten Aufgabenbereichen konnten die Projektpartner sehr gute Ergebnisse und Entwicklungen erzielen. Hier sind individuelle Ergebnisse erzielt worden, welche es in den kommenden Monaten zu einem ganzheitlichen Testfeld zusammenfügen zu können.
- Erstes Projektmeeting während COVID-19 16. März 2020
Neue Herausforderungen im Projekt und in der Projektdurchführung; der erste Lookdown der Covid-19 Pandemie zwingt uns dazu, die Projekttreffen und Abstimmungsmeetings auf den digitalen Raum zu verlegen. Die größte Herausforderung liegt hierbei in der Überprüfung und Anpassung zur Umstrukturierung in der Projektplanung, da physische Tests im Home-Office nicht möglich sind. Durch die geschickte Umverteilung und dem Vorziehen ausschließlich virtueller Inhalte kann das Projekt vollumfänglich fortgesetzt werden.
- Projektmeeting in Köln 21. Januar 2020

- City in Motion: Das Projekt geht an den Start 8. Januar 2020


